
 Research Intern at AdaComp Lab, School of Computing, National University of Singapore
Research Intern at AdaComp Lab, School of Computing, National University of Singapore Undergraduate at College of Engineering, Peking University
Undergraduate at College of Engineering, Peking UniversityI am a fourth year undergraduate student at College of Engineering, Peking University (PKU), where I am advised by Prof. Meng Guo and Prof. Chang Liu. I am expected to receive my bachelor's degree in 2026. I am currently a research intern at AdaComp Lab, School of Computing, National University of Singapore, advised by Prof. David Hsu.
My research interests lie at the intersection of task-planning, motion planning, learning, and control in robotic systems. I am particularly interested in developing task-planning systems that can plan and execute complex tasks in open-world environments.
Warning
Problem: The current name of your GitHub Pages repository ("Solution: Please consider renaming the repository to "
http://".
However, if the current repository name is intended, you can ignore this message by removing "{% include widgets/debug_repo_name.html %}" in index.html.
Action required
Problem: The current root path of this site is "baseurl ("_config.yml.
Solution: Please set the
baseurl in _config.yml to "Education
-
Peking UniversityB.S. in Theoretical and Applied MechanicsSep. 2022 - present
Experience
-
 University of Hong KongEngineering InternJun. 2025 - Jul. 2025
University of Hong KongEngineering InternJun. 2025 - Jul. 2025 -
National University of SingaporeResearch InternSep. 2025 - present
News
Selected Publications (view all )
LOMORO: Long-term Monitoring of Dynamic Targets with Minimum Robotic Fleet under Resource Constraints
Mingke Lu, Shuaikang Wang, Meng Guo
IROS 2025
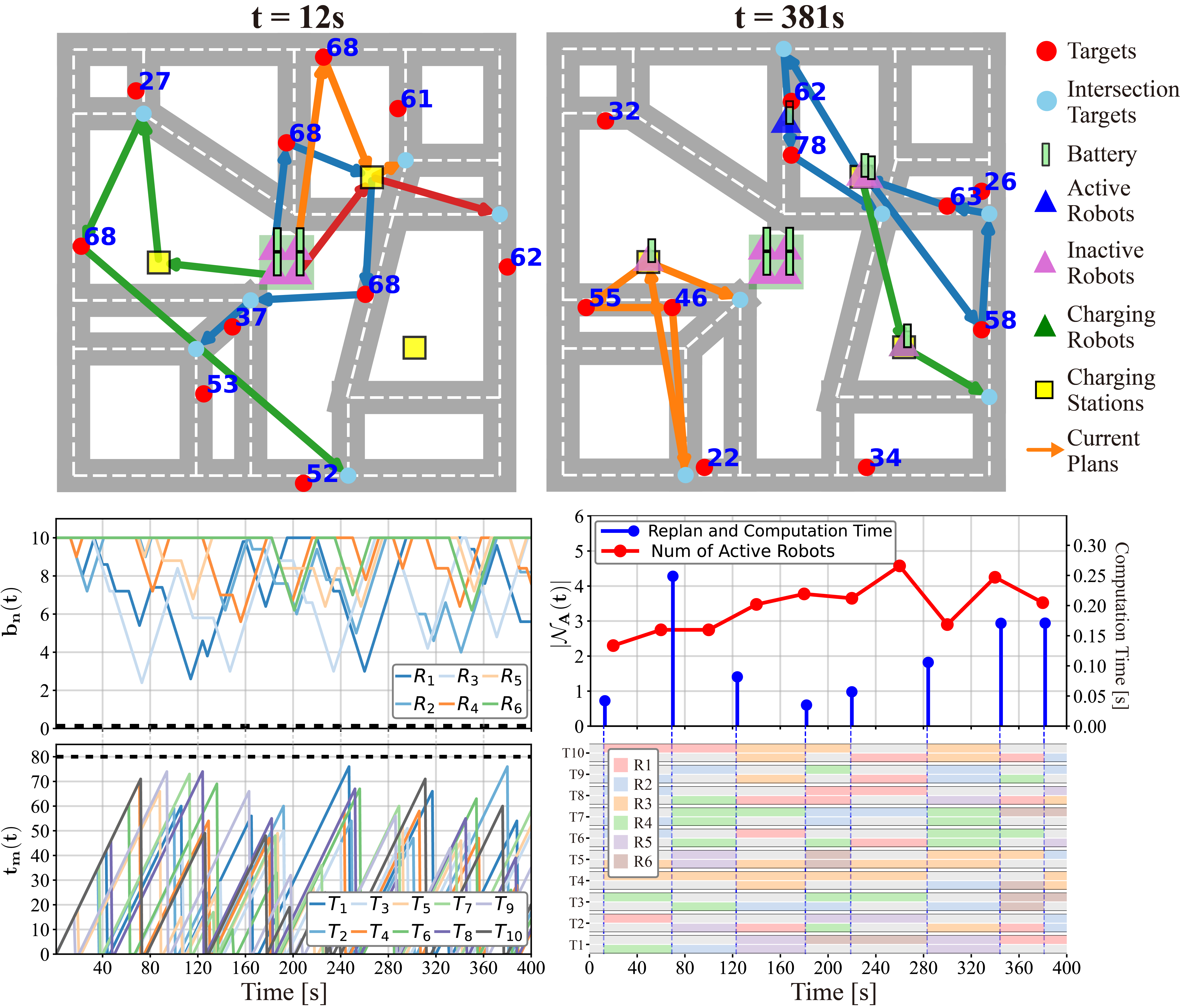
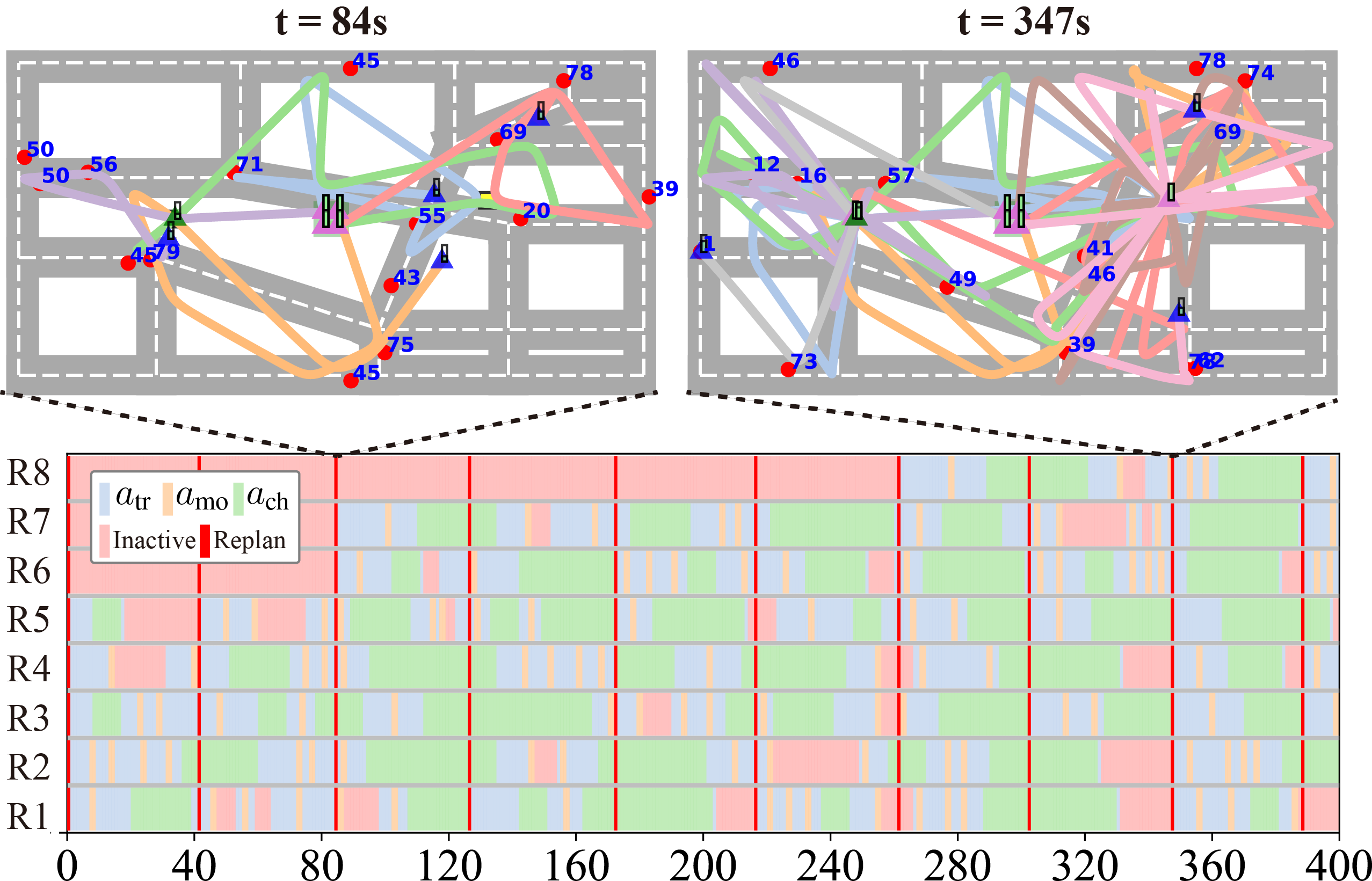
Long-term monitoring of numerous dynamic targets can be tedious for a human operator and infeasible for a single robot, e.g., to monitor wild flocks, detect intruders, search and rescue. Fleets of autonomous robots can be effective by acting collaboratively and concurrently. However, the online coordination is challenging due to the unknown behaviors of the targets and the limited perception of each robot. Existing work often deploys all robots available without minimizing the fleet size, or neglects the constraints on their resources such as battery and memory. This work proposes an online coordination scheme called LOMORO for collaborative target monitoring, path routing and resource charging. It includes three core components: (I) the modeling of multi-robot task assignment problem under the constraints on resources and monitoring intervals; (II) the resource-aware task coordination algorithm iterates between the high-level assignment of dynamic targets and the low-level multi-objective routing via the Martin’s algorithm; (III) the online adaptation algorithm in case of unpredictable target behaviors and robot failures. It ensures the explicitly upper-bounded monitoring intervals for all targets and the lower-bounded resource levels for all robots, while minimizing the average number of active robots. The proposed methods are validated extensively via large-scale simulations against several baselines, under different road networks, robot velocities, charging rates and monitoring intervals.
LOMORO: Long-term Monitoring of Dynamic Targets with Minimum Robotic Fleet under Resource Constraints
Mingke Lu, Shuaikang Wang, Meng Guo
IROS 2025
Long-term monitoring of numerous dynamic targets can be tedious for a human operator and infeasible for a single robot, e.g., to monitor wild flocks, detect intruders, search and rescue. Fleets of autonomous robots can be effective by acting collaboratively and concurrently. However, the online coordination is challenging due to the unknown behaviors of the targets and the limited perception of each robot. Existing work often deploys all robots available without minimizing the fleet size, or neglects the constraints on their resources such as battery and memory. This work proposes an online coordination scheme called LOMORO for collaborative target monitoring, path routing and resource charging. It includes three core components: (I) the modeling of multi-robot task assignment problem under the constraints on resources and monitoring intervals; (II) the resource-aware task coordination algorithm iterates between the high-level assignment of dynamic targets and the low-level multi-objective routing via the Martin’s algorithm; (III) the online adaptation algorithm in case of unpredictable target behaviors and robot failures. It ensures the explicitly upper-bounded monitoring intervals for all targets and the lower-bounded resource levels for all robots, while minimizing the average number of active robots. The proposed methods are validated extensively via large-scale simulations against several baselines, under different road networks, robot velocities, charging rates and monitoring intervals.
Path-Tracking Hybrid A* and Hierarchical MPC Framework for Autonomous Agricultural Vehicles
Mingke Lu, Han Gao, Haijie Dai, Qianli Lei, Chang Liu
arxiv 2024
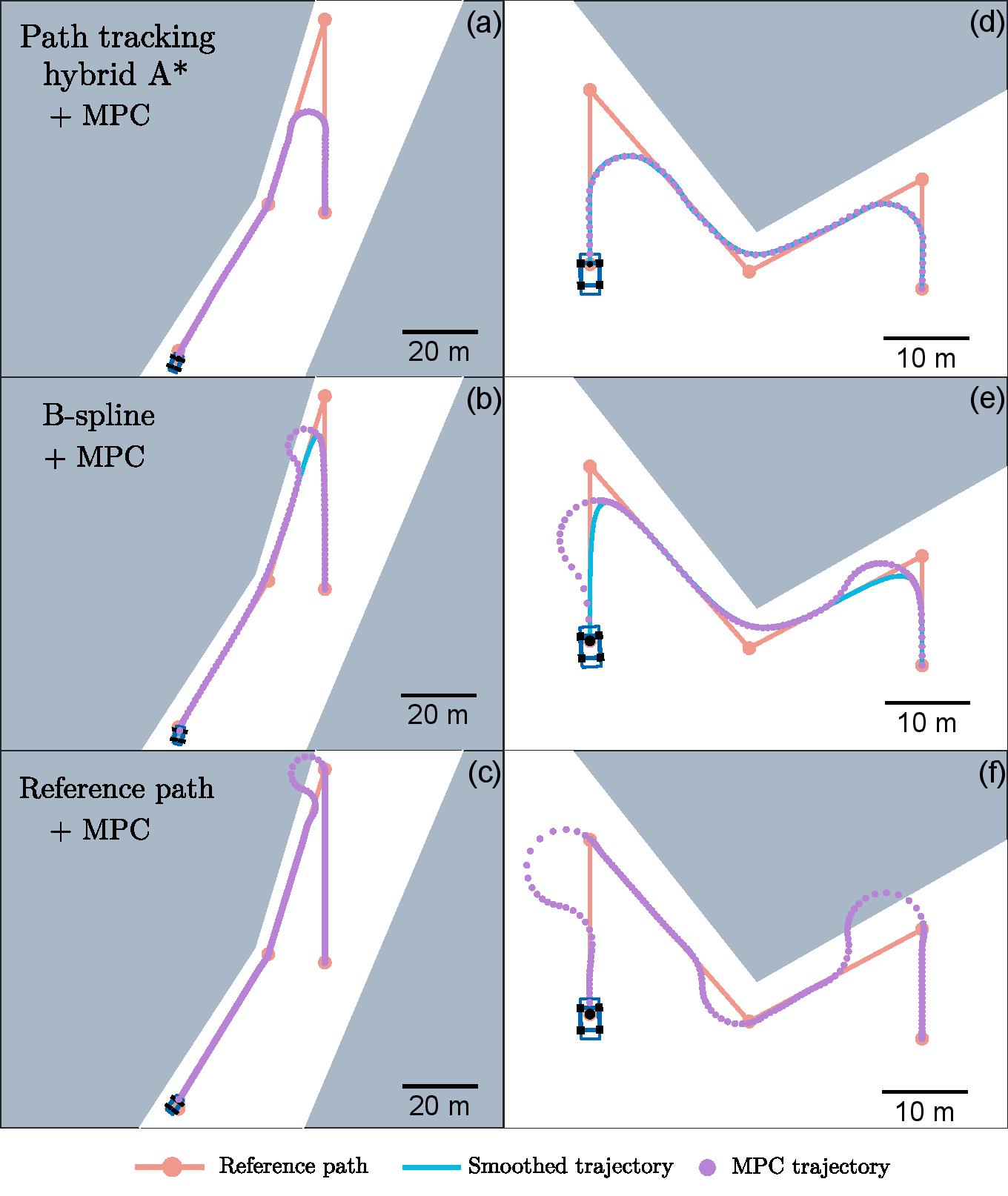
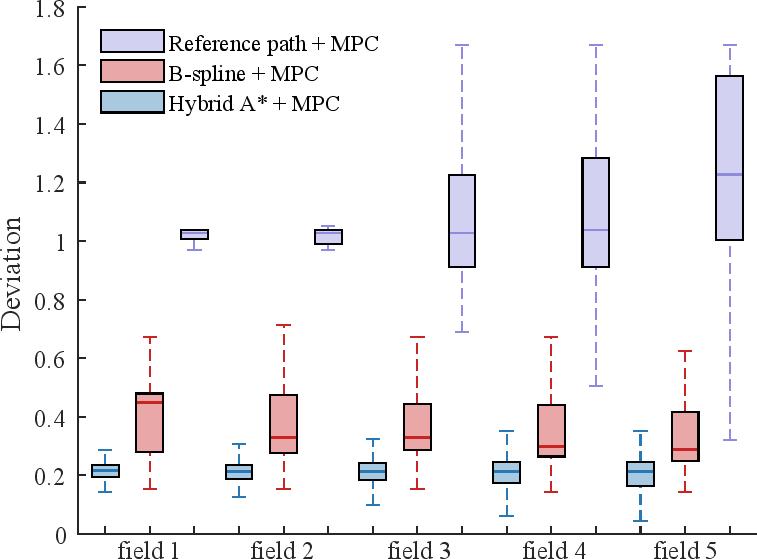
We propose a Path-Tracking Hybrid A* planner coupled with a hierarchical Model Predictive Control (MPC) framework for path smoothing in agricultural vehicles. The goal is to minimize deviation from reference paths during cross-furrow operations, thereby optimizing operational efficiency, preventing crop and soil damage, while also enforcing curvature constraints and ensuring full-body collision avoidance. Our contributions are threefold: (1) We develop the Path-Tracking Hybrid A* algorithm to generate smooth trajectories that closely adhere to the reference trajectory, respect strict curvature constraints, and satisfy full-body collision avoidance. The adherence is achieved by designing novel cost and heuristic functions to minimize tracking errors under nonholonomic constraints. (2) We introduce an online replanning strategy as an extension that enables real time avoidance of unforeseen obstacles, while leveraging pruning techniques to enhance computational efficiency. (3) We design a hierarchical MPC framework that ensures tight path adherence and real-time satisfaction of vehicle constraints, including nonholonomic dynamics and full-body collision avoidance. By using linearized MPC to warm-start the nonlinear solver, the framework improves the convergence of nonlinear optimization with minimal loss in accuracy. Simulations on real-world farm datasets demonstrate superior performance compared to baseline methods in safety, path adherence, computation speed, and real time obstacle avoidance.
Path-Tracking Hybrid A* and Hierarchical MPC Framework for Autonomous Agricultural Vehicles
Mingke Lu, Han Gao, Haijie Dai, Qianli Lei, Chang Liu
arxiv 2024
We propose a Path-Tracking Hybrid A* planner coupled with a hierarchical Model Predictive Control (MPC) framework for path smoothing in agricultural vehicles. The goal is to minimize deviation from reference paths during cross-furrow operations, thereby optimizing operational efficiency, preventing crop and soil damage, while also enforcing curvature constraints and ensuring full-body collision avoidance. Our contributions are threefold: (1) We develop the Path-Tracking Hybrid A* algorithm to generate smooth trajectories that closely adhere to the reference trajectory, respect strict curvature constraints, and satisfy full-body collision avoidance. The adherence is achieved by designing novel cost and heuristic functions to minimize tracking errors under nonholonomic constraints. (2) We introduce an online replanning strategy as an extension that enables real time avoidance of unforeseen obstacles, while leveraging pruning techniques to enhance computational efficiency. (3) We design a hierarchical MPC framework that ensures tight path adherence and real-time satisfaction of vehicle constraints, including nonholonomic dynamics and full-body collision avoidance. By using linearized MPC to warm-start the nonlinear solver, the framework improves the convergence of nonlinear optimization with minimal loss in accuracy. Simulations on real-world farm datasets demonstrate superior performance compared to baseline methods in safety, path adherence, computation speed, and real time obstacle avoidance.